
User Projects |
If you would like to see your project in this section e-mail endurance@endurance-rc.com with a brief description and any media you wish to include in the posting. |
Joystick Controlled Helicopter
From: Josh Alex
The two videos above were sent in by Josh Alex. Josh put together an incredible tutorial/informative video on how he setup his PCTx and ServoCommander software to fly an R/C helicopter using a Saitek joystick. He reports that it took him less than an hour to get his helicopter setup and flying around with the system! Thank you for your submission Josh and keep those videos coming.
Security Rover
From: Thomas Coyle
This submission involves the use of a PCTx to achieve remote user control and tele-autonomous control of a security rover Thomas designed. Thomas is currently still in the process of building his rover but he plans to outfit it with an arm and camera that will be used to guide the rover by user control to interesting objects and then by using heat sensors to autonomously track objects of interest he finds wondering around his property. Keep it up Thomas!
GIS R/C Plane
From: Edan Cain


Edan designed an awesome software application that allows him to capture images via an R/C plane along with GPS coordinates of where the image was captured. A live video feed can (Black square not activated for screen shot) also be viewed from the application. GPS data is also fed back to the controller PC and incorporated into the HUD to provide the real time telemeter data you see in the image. Edan is currently working on building his own head tracker and writing a auto pilot/guidance system for the elevator and rudder to correct some of the planes drift.
Remote Demolition Derby
From: Prototype This! Discovery Channel

This project was created by the hosts of the show Prototype This! on the Discovery channel. In this episode, a group of four hackers used the PCTx interface to control full sized cars for a demolition derby. The derby tested the viability of a a car safety system to sense driver aggression and in turn shut off the vehicle. Here are a few screen shots and a short clip of the episode. You can find the PCTx in the second image.
"Couldn't have done it without those pctx units!" -Russell Vincent, Producer at Beyond Productions
http://www.youtube.com/watch?v=leVLTFy4vXo
PT-2 Demo by FPVProject.net
From: Marty
The above video shows Martys PT-2 setup in action. See this page for a more detailed build log. Continue to the video below to see how Marty used the PT-2.
Animatronic Eyes
From: Gary Willet (WilletFX)
Gary used the 25 Servo Controller along with Brookshire software VSA to control a custom made animatronic eye. This video will show how the system works, as well as what parts are used to re-create this type of setup. See Gary's other videos demonstrating how he created the eye and the mechanical components.
R/C Car Controlled with Gamepad and
R/C Heli Controlled with a Joystick
By: typicalaimster
FPV R/C Car
By: AlternateRC
R/C Heli Control via Joystick
By: TheBillhelm
R/C Heli Control via Neurofeedback Interface
By: Norwegian University of Secience and Technology
Color Tracking R/C Car
By: nytro81
Remote Rock Crawler
From: Birdy

Birdy created an awesome rock crawler featuring a built in laptop and webcam. Attached to the PC is a 25 Servo Controller controlled by ServoCommander. To save weight Birdy removed the keyboard and LCD and remotes into the PC to gain control of the crawler. Birdy hopes to one day make the crawler autonomous.
SunBot
From: Daniel @ Monarch-Power
Daniel created an iPhone controlled R/C sun-tracker called the SunBot. The SunBot utilizes the WiFi Servo Controller for control and a PT-3 to control the solar dish used for mobile sun tracking. A wireless router has also been included as future upgrades include adding and camera, accelerometer and other sensors. Visit www.Monarch-Power.com for future products and more info.
LEGO Unimog
From: Tim
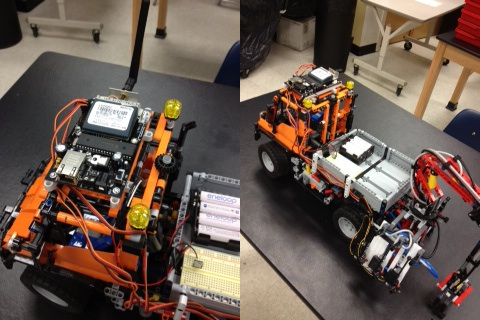
Tim and his team used the WiFi Servo Controller to control a fleet of LEGO Technic Unimog's which
have a phneumatic crane attached.
Project Condore: UAV Rocket
From: Chris
Project Condore is a unique rocketry program attempting to develop a shuttle-type small-to-mid-scale aircraft capable of functioning as a rocket, lifting off vertically, but also capable of cruising, or gliding back in piloted flight before ejecting an aft parachute at around 300ft, just like most rockets end their flights.
The rockets can fly high enough to hinder visibility so Chris has created an FPV station using the PCTx with Spektrum DX6i to perform the return cruise using a joystick and rudder pedals. A direct video feed with OSD allows for true visual flight eference.
More videos can be found here.